Neng Wang 王能

I am a Ph.D candidate at NuBot group, National University of Defense Technology(NUDT). I am under the supervision of Prof. Zhiqiang Zheng and receive collaborative guidance from Prof. Huimin Lu and Assoc. Prof. Xieyuanli Chen. My current research focuses on Point Cloud Understanding and SLAM. Previously, I studied at Southwest Petroleum University(SWPU) and obtained a bachelor’s degree, with the honor of Outstanding Graduate. I then direct entry for doctoral program at NUDT.
Github: neng-wang | Email: nwang@nudt.edu.cn, neng.wang@hotmail.com
Research Interest
Robotics, SLAM, Point Cloud Understanding
Recent News
- [Jun, 2025] 3 paper are accepted to IROS 2025 👏
- [May, 2025] Our paper SegNet4D is accepted to T-ASE 2025 👏
- [Apr, 2025] Our paper RadarSFEMOS is accepted to RA-L 2025 👏
- [Oct, 2024] Our paper SGLC is accepted to RA-L 2024 👏
- [Jan, 2024] 1 paper is accepted to ICRA 2024 👏
- [Jul, 2023] We get the Best-in-Class Dexterity in RoboCup2023 🍻🎉
- [Jun, 2023] Our paper InsMOS is accepted to IROS 2023 👏
Publications
InsMOS: Instance-Aware Moving Object Segmentation in LiDAR Data
Neng Wang, Chenghao Shi, Ruibin Guo, Huimin Lu, Zhiqiang Zheng, Xieyuanli Chen
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023
[Page]
[Paper]
[arXiv]
[Code]
[Data]
SGLC: Semantic Graph-Guided Coarse-Fine-Refine Full Loop Closing for LiDAR SLAM
Neng Wang, Xieyuanli Chen, Chenghao Shi, Zhiqiang Zheng, Hongshan Yu, Huimin Lu
IEEE Robotics and Automation Letters (RA-L) 2024
[Page]
[Paper]
[arXiv]
[Code]

SegNet4D: Efficient Instance-Aware 4D Semantic Segmentation for LiDAR Point Cloud
Neng Wang, Ruibin Guo, Chenghao Shi, Ziyue Wang, Hui Zhang, Huimin Lu, Zhiqiang Zheng, Xieyuanli Chen
IEEE Transactions on Automation Science and Engineering (T-ASE) 2025
[Page]
[Paper]
[arXiv]
[Code]
Leveraging Semantic Graphs for Efficient and Robust LiDAR SLAM
Neng Wang, Huimin Lu, Zhiqiang Zheng, Yun-Hui Liu, Xieyuanli Chen
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
[Page]
[Paper]
[arXiv]
[Code]
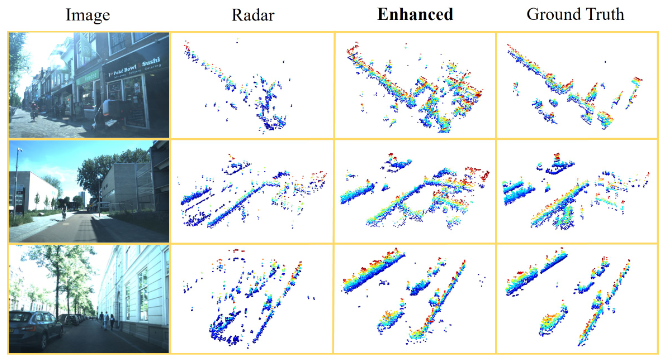
Diffusion-Based Point Cloud Super-Resolution for mmWave Radar Data
Kai Luan, Chenghao Shi, Neng Wang, Yuwei Cheng, Huimin Lu, Xieyuanli Chen
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2024
[Paper]
[arXiv]
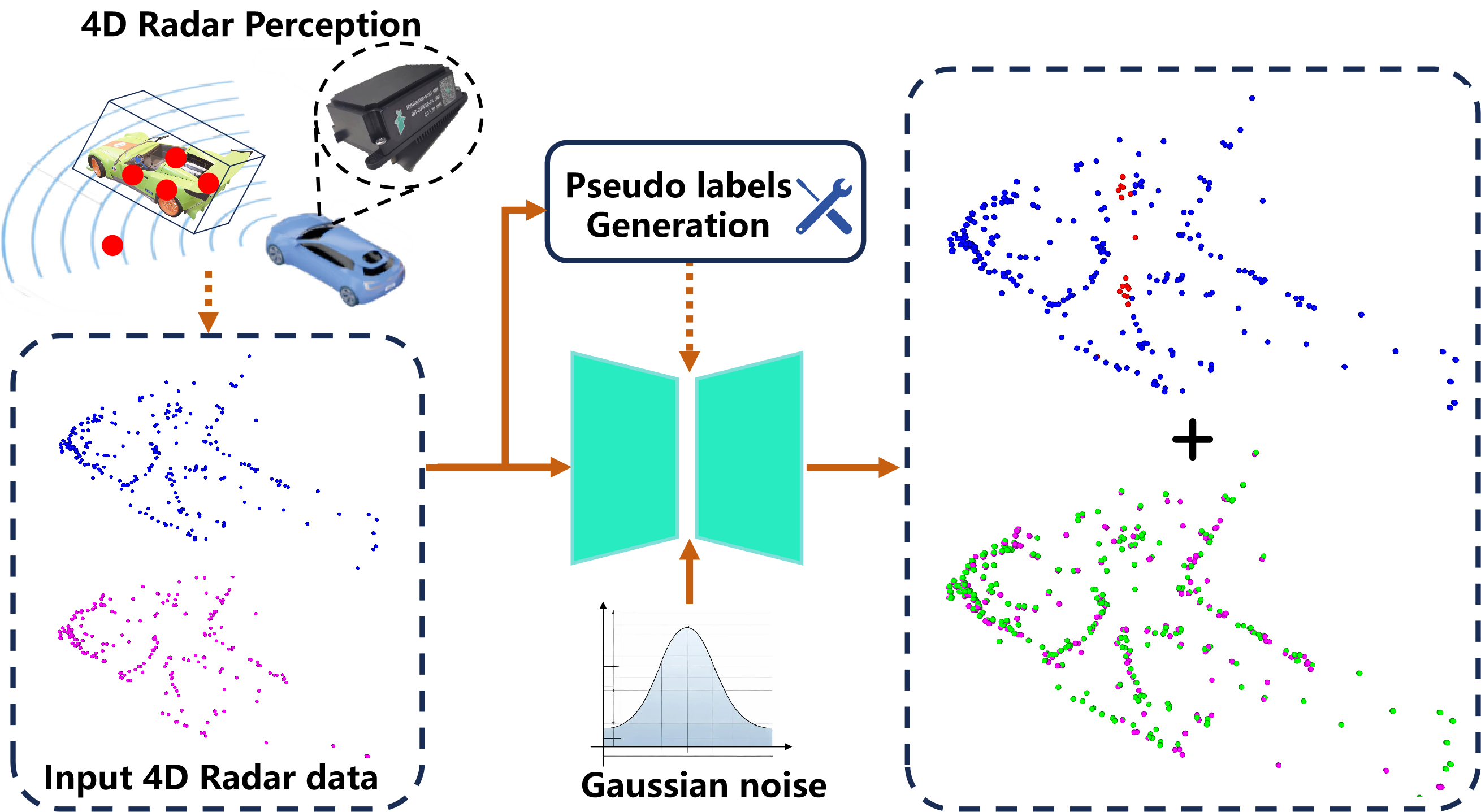
Self-Supervised Diffusion-Based Scene Flow Estimation and Motion Segmentation With 4D Radar
Yufei Liu, Xieyuanli Chen, Neng Wang, Stepan Andreev, Alexander Dvorkovich, Rui Fan, Huimin Lu
IEEE Robotics and Automation Letters (RA-L) 2025
[Paper]
[Code]
BEVDiffLoc: End-to-End LiDAR Global Localization in BEV View based on Diffusion Model
Ziyue Wang, Chenghao Shi, Neng Wang, Qinghua Yu, Xieyuanli Chen, Huimin Lu
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
[Paper]
[arXiv]
[Code]
Efficient Instance Motion-Aware Point Cloud Scene Prediction
Yiming Fang, Xieyuanli Chen, Neng Wang, Kaihong Huang, Hesheng Wang, Huimin Lu
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
[Paper]
[Code]
Projects
Major Member - 2022, 2023 RoboCup Rescue * 07/2021 - 08/2023*
Goal: Build a rescue scene map and plan paths for robot to navigate to the target location.
My main responsibility is SLAM and paths planning, based on Faster-lio and TARE algorithms, combining them with our robots. Besides, I also manipulate the robotic arm to perform dexterity tasks.
Video: [NuBot robot][SLAM & local planner]
Honors & Awards
- Best in class | RoboCup Rescue - Dexterity, Bordeaux, France, 07/2023
- First Prize | China Robot Competition and RoboCup - Robot Rescue, 11/2022
- Second Prize | China Robot Competition - Environmental Autonomous Exploration, 11/2022
- Best in class | RoboCup Rescue - Exploration and Mapping Scenario, 07/2022
- Best in class | RoboCup Rescue - Search and Inspect, 07/2022
- First Prize | China Robot Competition for Robot Rescue, 11/2021
- Outstanding Graduate and Excellent Graduation Projects | Southwest Petroleum University, 06/2021
- Yongyi scholarship | (first-class top 0.1%), Sichuan, 12/2019
- Principal scholarship | (first-class top 0.1%), Sichuan, 12/2020
- Honorable Mention | Interdisciplinary Contest in Modeling, Sichuan, 3/2020,
- Grand Prize | National Educational Robotics Competition, Guangxi, 11/2018
- Second Prize | National Undergraduate Intelligence Vehicle Competition, Shandong, 08/2019
- Second Prize | National Undergraduate Electronic Design Contest (Sichuan Region), Chengdu, 08/2019
- Third Prize | National Engineering Robotics Competition and International Open Competition,Guangdong, 04/2019
- National Scholarship | (first-class top 0.5%), 2018-2019
Services
Conference Reviewers
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023, 2024, 2025
- IEEE International Conference on Robotics and Automation (ICRA) 2024, 2025
Journal Reviewers
- IEEE Robotics and Automation Letters